





















优傲机器人速度设置_UR优傲机器人搭配视觉
机器视觉系统正日益成为机器人的标准配置。 就像机器人的眼睛一样,它可以帮助机器人快速找到并识别工件,并完成相关的工件拾取,装卸和检查。 视觉系统和机器人的兼容性主要体现在使用ModbusTCP协议或Socket通信的通信中,这两种通信均受Universal Robots支持。
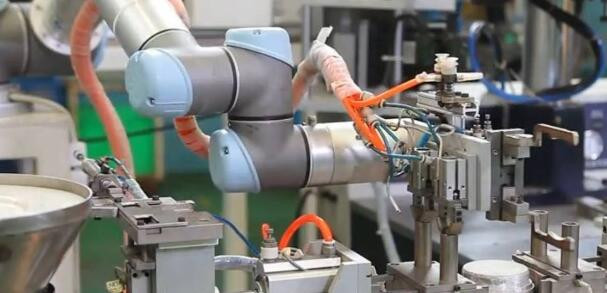
越来越多的视觉系统品牌与Universal Robots兼容,包括康耐视,Keyence,Basler,Microscan,Sick,Robotiq和国产智金。
在通常情况下,在打开通用机器人电源以运行程序时,需要完成以下步骤:[/ s2 /]引导,初始化机器人(打开,启动),加载程序,启动程序 ,返回到初始点(自动),启动程序。 [/ s2 /]
为了自动完成上述步骤,您需要在“安装设置”窗口的“默认程序”选项卡中设置自动加载程序,并设置DI信号以自动初始化和自动启动程序。 另外,请记住,保存时必须将其存储在default.installation文件中。
为了避免返回初始点的操作,可以将初始点的航点类型设置为相对航点或可变航点,但必须确保机器人的运动过程返回到初始点 在当前位置是安全的。
通用机器人快的TCP(工具中心点)速度可以设置为3000 mm / s。 在现场运行时,建议在循环时间的条件下使用大约1000 mm / s [/ s2 /],相应的加速度应适当匹配。 如果加速度太小,则在有限的行驶距离内无法达到设定值; 如果加速度过大,将触发机器人“保护停止”警报。
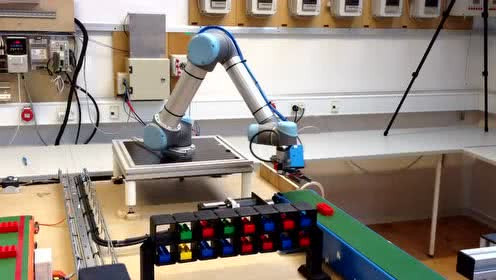
通用机器人是协作机器人,通常不需要安装围栏,因此需要在风险评估的基础上设置安全参数,包括大TCP速度; 通用机器人的重量更轻,并且在高速移动时需要快速停止。 它对机器人手臂的稳定性有一定影响,因此需要在程序中优化机器人的运动,例如添加脚本指令,如stopj()或stopl()。
通用机器人将始终监视关节的力量和力量。 如果速度和加速度设置不在正常范围内,则机器人将报告“保护性停止”错误消息并停止,以避免对关节电动机和减速器造成硬件损坏。