





















机器人料框无序挑拣为什么如此困难?

拿起手机并将其放入口袋,这几乎是我们每天都要进行的动作,这些动作已成了肌肉的本能。但对于任何机器人来说,这都是一项不小的挑战。
机器人料框无序挑拣被视为当今时代大的技术挑战之一。每天都有不同形状、材料和尺寸的零件进入加工过程。它们需要被订购、放置、挑选,并且大部分必须被送入机器或进入一个程序。传统上,这项任务很难实现自动化。
传统的工业机器人适用于结构化环境,完成重复性作业任务。例如将盖子拧在瓶子上,传统机器人在灵巧作业、在线感知、对人的行为和抽象命令的理解、认知与决策能力等诸多方面远逊于人,无法与人实现高效的沟通和交流。重要的是,每次与它们交互的瓶子都必须放置在完全相同的位置。如果链条突然加速或某些瓶子翻倒,机器人无法感知到这个动作,它将继续“拧瓶盖”,就好像什么都没出错。

为了使机器人能够胜任更复杂的工作,机器人不但要有更好的控制系统,还需要更多地感知环境的变化。机器人视觉以其信息量大、信息完整成为重要的机器人感知功能。
现在各个行业自动化对柔性化生产要求越来越高,通过3D视觉定位系统,相当于让机器人多了一双“眼睛”,通过对生产工件的3D扫描,获取建模数据后,就能给机器人的路径,让机器人抓取物料更加精准,更加高效。
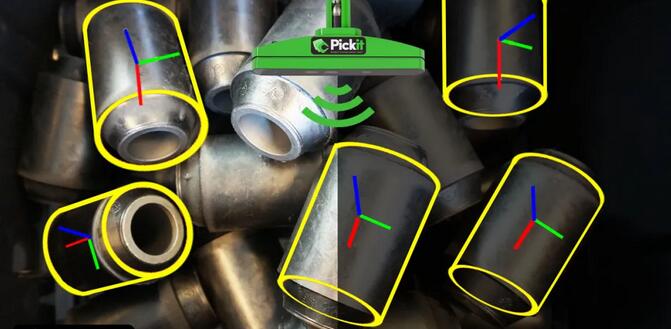
借助Pick-it视觉系统,任何机器人都可以快速找到混合箱中零件的位置和方向,我们的人工智能使您的机器人变得聪明 我们的产品:
• 了解你的零件是什么样的
• 知道你的机器人在哪里以及它是如何移动的
• 知道你的箱子在哪里
• 知道你的工具是什么样的
• 预测并防止与障碍物和其他部件的碰撞
• 决定接下来选择的零件
• 更多……
运用3D视觉定位系统结合机械臂可以完成物料分拣、订单分拣、拆码垛、上下料等工作,并且针对不同的客户需求,可设计不同的、具有针对性的专业解决方案。